
Hearken to this text

A cell robotic and a cell manipulator operator aspect by aspect in a warehouse. | Credit score: Adobe Inventory
One rising protocol for real-time, deterministic communication in robotics is time-sensitive networking, or TSN. The important thing benefit of TSN is that it makes use of normal Ethernet networking cables, hubs, and switches.
When architecting a management system, roboticists and management engineers now not must manufacture customized cabling for communication between a robotic controller and the drives. Networked structure allows a extra modular design for a robotic system.
Networked management structure goes again many years
Adept Expertise was one of many early industrial robotic corporations to market and promote a modular and networked controller and movement management structure. Adept used FireWire (IEEE 1394) because the communications technique for its multi-axis linear movement controllers. It changed conventional management structure with networked controller, movement management, and imaginative and prescient processing modules communicated over FireWire.
I used to be the product supervisor for the Adept Expertise controller product line and an IEEE committee member for the standardization of the FireWire IEEE 1394 protocol as a bus for real-time management communication on the coronary heart of the Adept SmartAxis product line.
A lot has occurred since 2002. Processor pace and functionality elevated, whereas its bodily dimensions decreased. Energy consumption has been optimized for power-constrained (battery-operated) purposes.
The explosive progress of the Web and demand for larger and better bandwidth communication created a basis for the development of each sort of utility that relies on networked interplay. The idea of the “cloud” and “edge” primarily based processing opened the floodgates for completely new enterprise fashions throughout the complete enterprise and IT ecosystem.
On this planet of robotics, the Robotic Working System (ROS) advanced to turn into an open-source platform broadly adopted by college labs, robotic startups, and mature robotics corporations.
ROS is now in its second era, and ROS 2 was redesigned from the bottom as much as meet the wants of manufacturing methods, offering the mandatory core software program and management elements to speed up robotics improvement.
Acceleration Robotics releases high-speed isochronous networking
Acceleration Robotics has now prolonged the idea of real-time isochronous community communication improvement pioneered by corporations like Adept Expertise, with the discharge of ROBOTCORE ROS 2 and ROBOTCORE RTPS. This marks a major milestone within the subject of robotics networking by implementing {hardware} (prototyped with an FPGA) expertise that enables robots to change data in lower than 2.5 microseconds.
These merchandise are meant to revolutionize robotics and ROS 2 networking communications by delivering speeds which might be 62x to hundreds of instances quicker than present requirements.
”We current a evaluation and classification of the assorted communication requirements related to the sector, in addition to an introduction to the everyday issues with conventional switched Ethernet networks,” stated Víctor Mayoral Vilches, founder, chairman, and CTO of Acceleration Robotics.
“We focus on a number of the TSN options which might be necessary for deterministic communications and check one of many shaping mechanisms, the time-aware shaper, in an instance robotic situation,” he added. “Our analysis means that TSN will ultimately change many real-time industrial options. The end result ought to create a unified panorama of bodily inter-operable robots and elements.”
Relating to the present state of the market, Vilches went on to say, “Proper now, we’ve accomplished tasks and collaborations with AMD, Intel, and Microchip. Our work with them continues, however we’re increasing in 2024 additional and into case research. Basically, we will probably be focusing extra on bringing these applied sciences into actual industrial use instances and have actual influence.”
“We’re closing offers with end-users principally in Spain, the Basque Nation, and centered on huge industrial robotic automation setups whereby robots want to maneuver quicker and thereby compute/talk quicker,” he stated.
Vilches was concerned within the TSN technical effort and pioneered a lot of the preliminary work in robotics, together with a paper from 2018 that’s nonetheless broadly cited by silicon distributors right now. In accordance with Vilches, the crew used plenty of the preliminary work and ideas from the Firewire working group to get impressed for this growth.
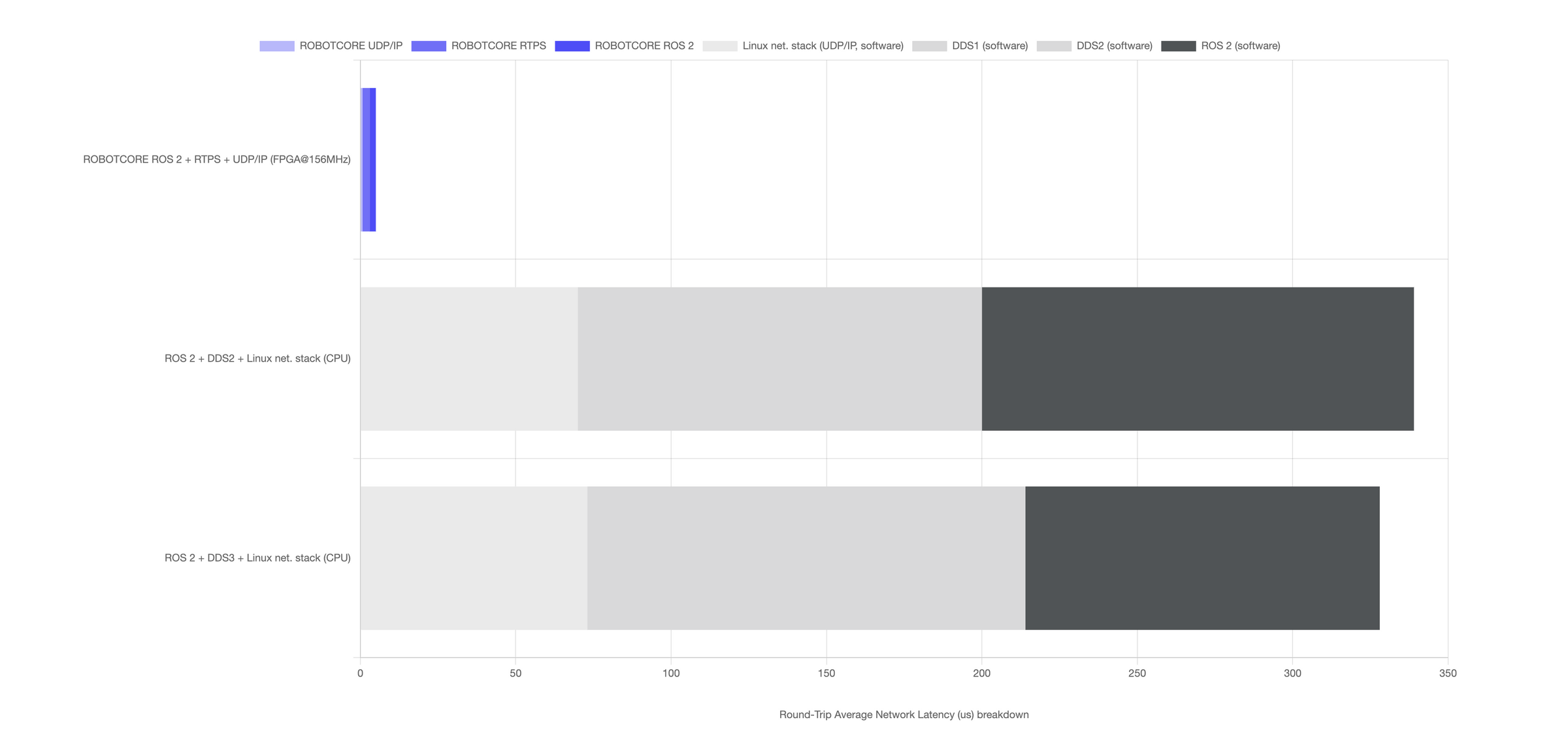
Spherical-trip common community latency breakdown. ROBOTCORE ROS 2 enhances the networking structure of robotic methods and tackles a typical criticism ROS 2: its latency overhead over the DDS communication middleware. It does so by constructing a {hardware} implementation of the core ROS 2 abstraction layers (RCL, RMW) and by establishing direct {hardware} knowledge paths with the underlying DDS middleware. This take away the latency overhead of ROS 2 over DDS for pace and absolute determinism. | Credit score: Acceleration Robotics
When requested how a lot the pace enchancment in baseline networking has enabled the extension of TSN to Ethernet, Vilches stated: “First, networking hyperlinks (knowledge hyperlink layers) these days are relatively spectacular and empower knowledge change inside only a few nanoseconds. We’re getting very spectacular outcomes with a number of the trendy FPGA options we’re utilizing now. That is very true for 10G, 100G, and above Ethernet hyperlinks, but additionally applies to wi-fi alternate options in addition to deterministic endeavors (similar to TSN with 10G NICs, and many others.).”
“Second, [we did a] full rewrite of the networking layers into {hardware},” he defined. “It took about 5 years to check correctly the bottlenecks within the robotics stack in alignment with well-liked approaches (e.g. ROS) and suggest an answer.”
Vilches wrote a bit about this context in a latest weblog submit. An Acceleration Robotics crew recognized the bottlenecks and mentioned the necessity for a whole redesign of the underlying networking layers, referred to as the ROS 2 underlayers, to attain low-latency isochronous communications. This concerned guaranteeing that each layer of the Open Programs Interconnection (OSI) stack might present such capabilities.
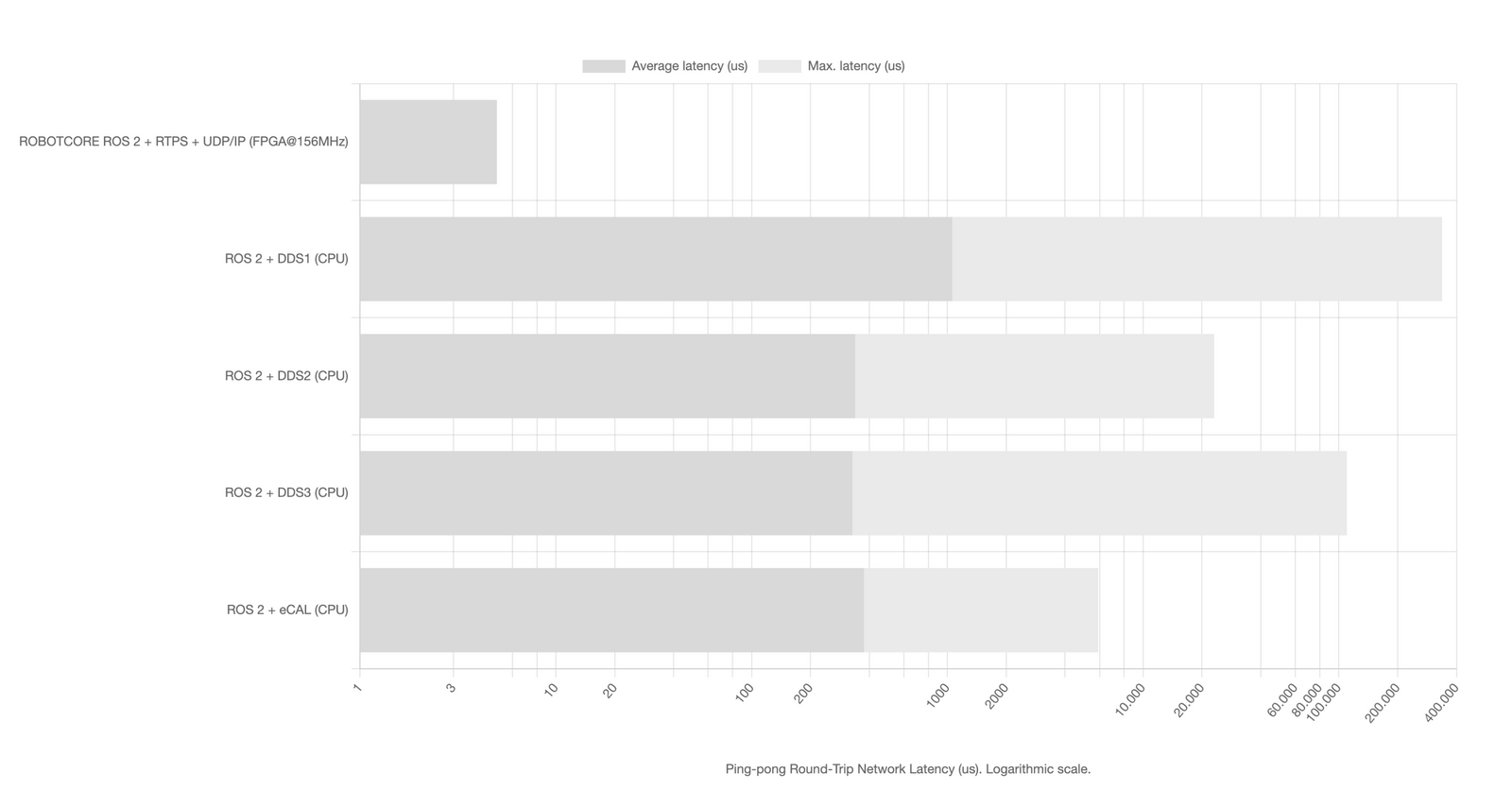
ROBOTCORE ROS 2 delivers absolute determinism by way of {hardware} when mixed with ROBOTCORE RTPS and ROBOTCORE UDP/IP. In comparison with software-based options, it ensures that the communication latency is decrease and that it stays the identical, whatever the load of the system. This important for real-time robotics and fixing main communication bottlenecks. | Credit score: Acceleration Robotics
One of many errors the crew noticed in previous approaches is that the de facto technique within the business to satisfy timing deadlines is a laborious, empirical, and case-by-case tuning of the system. They concluded that this “CPU whack-a-mole” strategy in robotics is unsustainable for real-time methods and this makes it laborious to scale.
The crew utterly rewrote the robotic networking stack, together with ROS 2, and applied it in {hardware}. The ensuing design was prototyped and applied into FPGAs.
Vilches and a bunch of teachers and business leaders got down to create a technique to measure robotics and management system efficiency. Acceleration Robotics revealed the RobotPerf documentation earlier this yr.
ROBOTCORE ROS 2 {hardware} implements the ROS 2 robotics framework for unprecedented community interface pace and effectivity. This robotic core (IP core) makes use of FPGA expertise to spice up ROS 2 communication pace. This speeds knowledge processing, reduces latency, and improves robotics system synchronization. ROBOTCORE ROS 2 powers the way forward for accelerated robotics networking by sending or receiving packages in lower than 2.5 microseconds, 62x quicker than CPU-based software program.
ROBOTCORE affords versatility for purposes
The ROBOTCORE ROS 2 is flexible and broadly appropriate, making it a viable answer for situations the place pace and reliability are non-negotiable. These purposes embody:
Industrial automation: Streamlines communication in manufacturing and meeting strains for enhanced operational effectivity.
Distant operation: Provides easy and responsive management in teleoperation methods, essential for precision duties.
Autonomous autos: Ensures speedy knowledge change important for the real-time decision-making of autonomous driving methods.
Analysis and improvement: Gives a dependable platform for growing and testing next-generation robotic applied sciences.
