
Hearken to this text

Brightpick applies machine imaginative and prescient and AI to robotic selecting. Credit score: Mike Oitzman
The Robotic Report Podcast just lately featured a dialog with Photoneo’s Jan Zizka concerning the new BrightPick success answer that the corporate launched earlier this yr. Beneath is an edited transcript of the dialog.

Jan Zizka, co-founder and CEO of Brightpick. | Credit score: Brightpick
Zizka is the co-founder and CEO of Brightpick and its guardian firm, Photoneo Brightpick Group. He has filed greater than 20 patents, starting from 3D sensing strategies to cell robotics. Zizka can also be a acknowledged professional within the fields of synthetic intelligence, machine imaginative and prescient, and warehouse automation.
Photoneo’s clients embrace Basic Motors, Volkswagen, and KUKA. Earlier than co-founding that firm, Zizka was a analysis engineer at Micro-Epsilon, a number one sensor producer.
He earned a Ph.D. in pc imaginative and prescient from Comenius College, throughout which he additionally did analysis on computational cameras and optics on the Massachusetts Institute of Expertise.
What’s Brightpick? What forms of market purposes or particular warehouse workflows is it designed for?
Brightpick is a derivative from Photoneo. The answer leverages the 3D notion and robotic selecting know-how that’s the core of Photoneo. It’s a warehouse automation answer particularly designed for order success and concentrating on completely different verticals like e-grocery, third-party logistics, and e-commerce.
The Brightpick answer is optimized to deal with smaller objects like small electronics, grocery objects, and comparable objects that may be saved in bulk in stock totes.
Describe the everyday success workflow for a Brightpick autonomous cell robotic (AMR).
The Brightpick AMR travels via the warehouse because it builds one discrete order much like a human picker. The warehouse stock must be organized right into a set of totes and the person objects must be “toteable.”
Leveraging an onboard cell manipulator, the eaches selecting is completed straight from the majority stock totes pulled from the shelf whereas the BrightPick AMR is stationary within the warehouse aisle.
What typical dimension of totes can Brightpick deal with?
We prefer to have one uniform-size tote for the warehouse. The popular totes are normally 60 by 40 cm [23.6 by 15.7 in.], and the peak of the tote may range, relying on the objects saved. The totes might be cut up into a number of compartments. The storage necessities rely upon the order frequency of various objects. House utilization is essential, and having compartmentalized totes helps to enhance the effectivity of the answer.
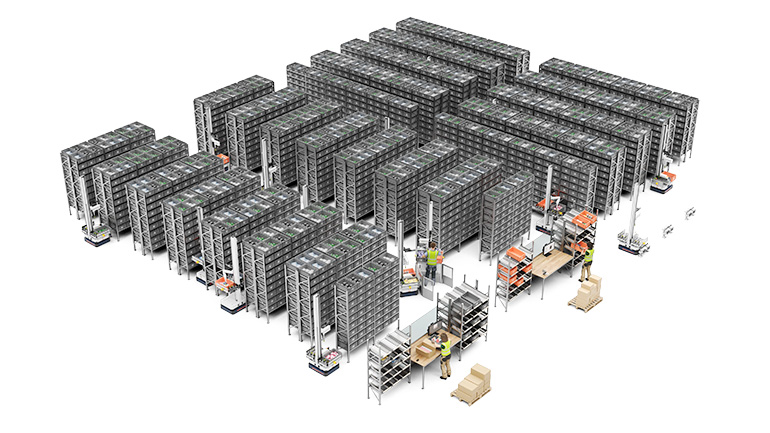
Brightpick picker AMRs traverse the warehouse to tug particular person objects for buyer orders. | Credit score: Brightpick
What was the design course of and the “Aha” second for the Brightpick answer? Photoneo’s energy is in 3D imaginative and prescient, 3D notion, and robotic imaginative and prescient steering, particularly for purposes like bin selecting.
Through the years, we have now been finding out how basically troublesome success is, and we determined it’s a sufficiently big downside to be solved. We made this robotic from the bottom up using all of the Photoneo applied sciences into Brightpick.
We already had the entire essential capabilities to perform this troublesome activity. Beginning with our 3D cameras, over time, we developed our machine studying engine.
In grocery, we will choose round 80% of things that we see from the tote. We prefer to name it “absolutely automated success,” which isn’t fully true, however our definition of absolutely automated success is in precept that we will automate 95% of the complete course of.
What are a few of the points that you just’ve needed to resolve for this new automated workflow for success?
Orchestrating the robotic is a troublesome downside. We use particular algorithms within the classical “touring salesman downside” to ship the person robots out for every SKU-picking activity. If it could be only one robotic, it could be easy.
Some of the advanced issues we’re fixing is one thing we name time-space planning. When you’ve a fleet of robots, every robotic may simply resolve a touring salesman downside individually, however right here we have now to orchestrate the robots as a fleet.
One difficulty we have now is that the robots could be competing for a given aisle, or perhaps a given SKU, and we have now to keep away from that. So it is a tremendous advanced downside. Because the robots journey via the warehouse, we have now to plan their paths, plan the selecting dwell instances, and negotiate conflicts the place two robots need to be in the identical place on the identical time.
 Submit your nominations for innovation awards within the 2024 RBR50 awards.
Submit your nominations for innovation awards within the 2024 RBR50 awards.
There are another robots available on the market, like InVia’s AMRs, which pull stock totes from a shelf and transport them to an item-picking location, then return the stock to the warehouse shelf. Is that this much like an automatic storage and retrieval system (ASRS)? Do you categorize Brightpick as an ASRS-type system?
I would categorize the InVia answer as a goods-to-person [G2P]-type answer, like Kiva Techniques. The opposite rising class is “robots to items,” and possibly that’s the appropriate class for Brightpick.
With the Kiva-like options, the robots have to maneuver bulk objects lengthy distances simply to select a single SKU for a buyer order. However crucial half is that the robotic has to convey this tote again to its long-term storage location within the warehouse. So bulk objects are repeatedly moved to the picker, again to the stock location, and again to the picker, and so forth.
So we consider that the BrightPick answer basically and mathematically requires 40% to 50% or much less journey. And that implies that you might have fewer robots deployed on the ground. Our objective is to create a super-efficient system. We’ve got to attain these efficiencies.

The Brightpick Autopicker AMR pulls bulk merchandise totes from the warehouse shelf to singulate particular person buyer objects. | Credit score: Brightpick
Brightpick makes use of a SCARA manipulator to select and place particular person objects from totes. Why a SCARA robotic versus a six-axis manipulator?
Possibly this isn’t the fascinating reply, however it comes all the way down to price. We made a trade-off between the complexity of AI and algorithms and the price of the manipulator. The selection to make use of a SCARA manipulator for selecting implies that the AI, gripper, and algorithms behind it are extra advanced for the bin-picking operation.
It took us a couple of years, and we designed round 200 grippers with completely different variations and completely different methods. What we ended up with is one thing that may be a good stability between complexity, price, and capabilities.
As we speak, we can’t be 100% assured of selecting each merchandise, however then no answer can. I feel people can nonetheless function a fallback answer by participating a close-by affiliate to assist choose an merchandise. I might say for patrons, end-to-end reliability is far more necessary than the truth that you may choose like 99.9% of the objects.
Do you employ a single gripper for all of the objects, or are you doing a device change for various sorts of elements?
We’ve got we have now each ideas. We do quite a lot of completely different gripper ideas together with a number of suction cups, gripper exchangers, and suction-cup exchangers.
So all of that is doable. It appears like not each warehouse requires such flexibility. In the end, we’ll find yourself with one thing like a gripper exchanger with two or three fingers.
So that you outlined this new section a couple of minutes in the past as a “robot-to-goods” answer. What makes this sort of system viable now?
The robotic you see right here might be the fifth era. It’s not designed to do 50 various things; it’s not like a general-purpose humanoid. However, what we have now carried out is optimize the price of every factor of the robotic to scale back the price of the required performance.
I’m tremendous pleased with what our crew was capable of do on the {hardware} design aspect and with procurement.
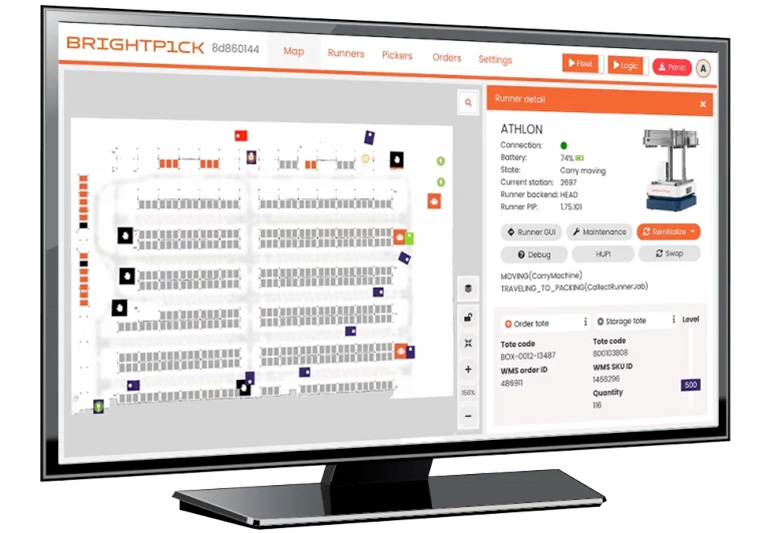
Brightpick consists of software program and optimization algorithms to manage materials move and the operation of the entire particular person robots on the warehouse ground. | Credit score: Brightpick
Bin selecting with cell manipulation has been a “holy grail” downside. Is there a breakthrough on this design that you just’re notably pleased with?
It comes all the way down to a holistic view of all of those newest developments in synthetic intelligence. It’s important to have the appropriate gripper, the appropriate path planning, the appropriate AI, and the appropriate idea. All the things must be good. And if one half is lacking, instantly, it isn’t possible.
On the AI aspect, this was not doable 5 to 6 years in the past. The intense breakthroughs allow machine studying to generalize to unseen objects. I feel that that is so highly effective. That is only the start.
For instance, IAM Robotics struggled for years to make cell manipulation viable. Why do you assume its strategy wasn’t profitable?
I feel it’s in all probability two issues. First, when you purchase a six-axis robotic from a significant provider, you will get an excellent product. However the worth is prohibitive. I feel there’s merely no means that you may make it occur right this moment.
Second, IAM Robotics was selecting straight from cabinets. That is advanced a really expensive replenishment course of. Our replenishment answer is to only dump it into the tote.
Replenishment in our system might be like 5 to 6 instances extra environment friendly as a result of robots will slot a given tote into the appropriate place within the warehouse. We are attempting to investigate the frequency at which objects are picked to arrange the place objects ought to go on the shelf.
You’ve constructed an algorithmic success heatmap of frequent objects. Are you always reorganizing the warehouse to make it extra environment friendly for the robots to tug objects?
Sure, precisely. In classical G2P methods, it’s good to reduce the space it’s good to journey with the robots. So shifting high-frequency SKUs nearer to the human pickers may be very apparent right here.
With these older G2P robots, they’re all equal, standalone, and self-sufficient. All of the robots can do all of the processes. They’ve their trajectories.
It’s not so apparent now to ask: “Do I need to create a hotspot someplace?” In all probability not, as a result of I can steer too many robots to the identical aisle or identical spot, and this congestion creates a brand new downside.
It’s important to in some way stability in a giant warehouse, between shortening distances and spreading these objects out too far. It’s a key optimization downside.

The Brightpick Autopicker is designed for slender aisles. | Credit score: Brightpick
Do you permit house within the aisles for two-way site visitors to keep away from potential collisions or path conflicts?
Two years in the past, a lot of the aisles have been one-way. As we speak, nearly all of them are two-way. With robust planning algorithms, we will resolve the paths for the robots to keep away from potential conflicts within the aisles.
We attempt solely to have one robotic in every aisle at a time. However this time-space planning downside is a tough downside to resolve. There are a number of ranges to it. However security with robots and collaborative manipulators is vital.
Are you able to share a few of your early buyer deployments?
Our greatest buyer right this moment is Rohlik Group, one of many fastest-growing e-grocers in Europe. These are large orders and principally ambient objects. We’re deploying a relaxing section within the upcoming weeks.
Grocery may be very fascinating. When you think about your loved ones shopping for 100 objects per week, that’s quite a lot of picks per order. When you examine that to different e-commerce, it might be that groceries are larger than the complete e-commerce section. I feel groceries are certainly one of our prime targets.
We’re ending a brand new deployment for a pharma consumer. On this use case, it’s quite a lot of smaller packing containers and a excessive variety of SKUs. After we have been designing the Brightpick system, this was one thing that we had in thoughts.
When taking a look at an utility, we take a look at the variety of picks per line. For instance, when you ask me for an utility having 100 objects per line, meaning quite a lot of picks for the given SKU.
Sure, that’s in all probability not optimum, and no human is way quicker. We’ve been counting 100 objects, you’ll nonetheless do it 5 instances faster than the robotic. We’re all the time looking for one of the best match so as profile.
Hearken to the interview in its entirety right here:
