
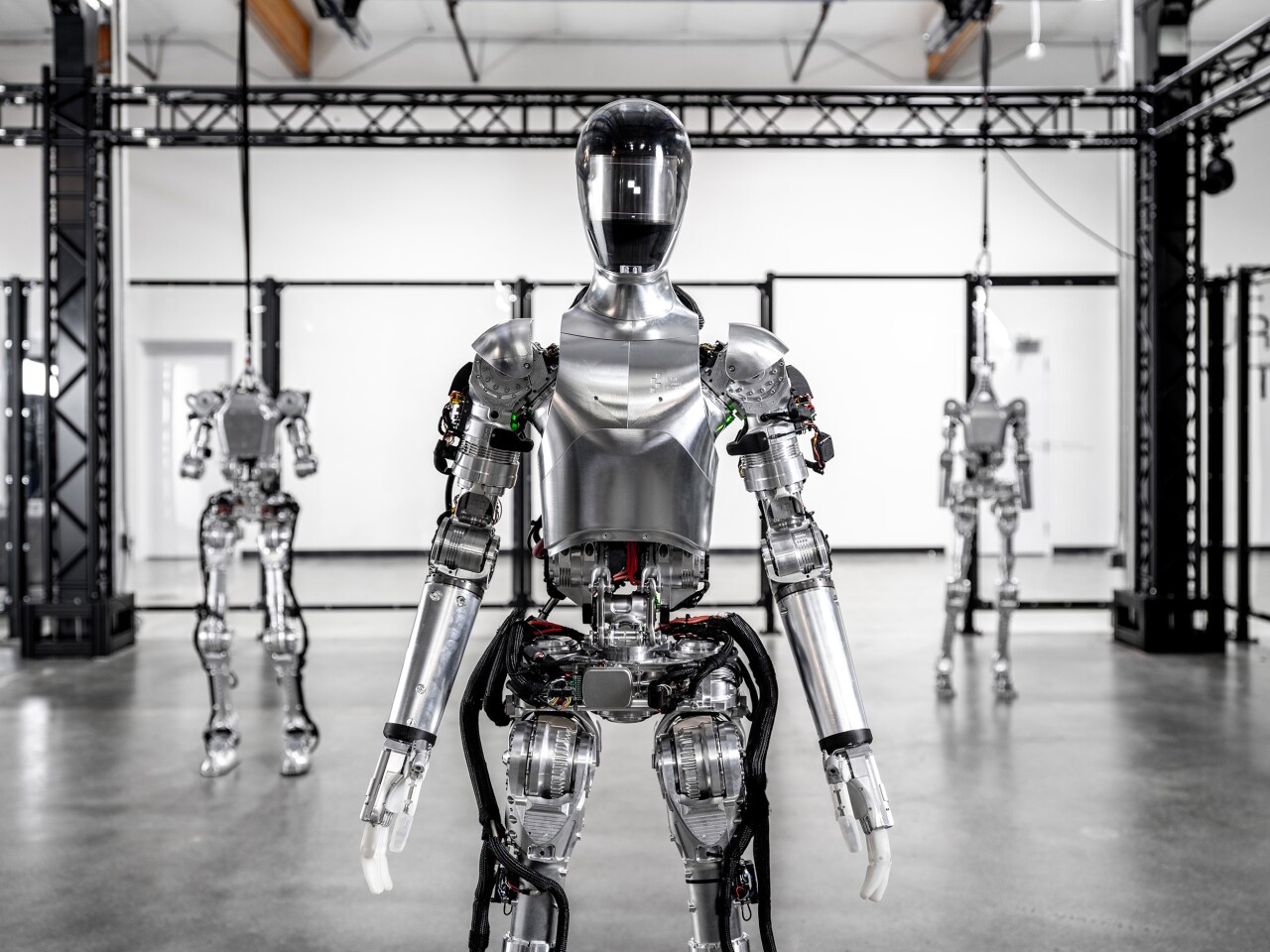
After simply 12 months of growth, Determine has launched video footage of its humanoid robotic strolling – and it is wanting fairly sprightly in comparison with its business competitors. It is our first have a look at a prototype that ought to be doing helpful work inside months.
Determine is taking a bluntly pragmatic strategy to humanoid robotics. It would not care about operating, leaping, or doing backflips; its robotic is designed to get to work and make itself helpful as shortly as potential, beginning with straightforward jobs involving shifting issues round in a warehouse-type surroundings, after which increasing its talents to take over an increasing number of duties.
Staffed by a gaggle of some 60-odd humanoid and AI trade veterans that founder Brett Adcock lured away from main corporations like Boston Dynamics, Google Deepmind, Tesla and Apple, Determine is hitting the general-purpose robotic employee area with the identical breakneck velocity that Adcock’s former firm Archer did when it arrived late to the eVTOL celebration.
Take a look at the video under, exhibiting “dynamic bipedal strolling,” which the group achieved in lower than 12 months. Adcock believes that is a file for a model new humanoid initiative.
Determine Standing Replace – Dynamic Strolling
It is a brief video, however the Determine prototype strikes comparatively shortly and easily, in comparison with the considerably unsteadier-looking gait demonstrated by Tesla’s Optimus prototype again in Could.
And whereas Determine’s not but able to launch video, Adcock tells us it is doing loads of different issues too; selecting issues up, shifting them round and navigating the world, all autonomously, however not all concurrently but.
The group’s objective is to point out this prototype doing helpful work by the top of the 12 months, and Adcock is assured that they’re going to get there. We caught up with him for a video chat, and what follows under is an edited transcript.
Determine
Loz: Are you able to clarify somewhat extra about torque-controlled strolling versus place and velocity based mostly strolling?
Brett Adcock: There’s two totally different types that people have used all through the years. Place and velocity management is principally simply dictating the angles of all of the joints, it appears to be fairly prescriptive about the way you stroll, monitoring the middle of mass and heart of stress. So that you form of get a really Honda ASIMO type of strolling. They name it ZMP, zero second level.
It is form of sluggish, they’re all the time centering the load over one of many toes. It isn’t very dynamic, within the sense that you may put stress on the world and attempt to actually perceive and react to what’s occurring. The actual world’s not good, it is all the time somewhat bit messy. So principally, torque management permits us to measure torque, or moments within the joints itself. Each joint has somewhat torque sensor in it. And that permits us to be extra dynamic within the surroundings. So we will perceive what forces we’re placing on the world and react to these instantaneously. It is very rather more fashionable and we predict it is the trail towards human-level efficiency of a really advanced world.
Is it analogous to the way in which that people understand and steadiness?
We form of sense torque and stress on objects, like we will like contact the bottom and we perceive that we’re touching the bottom, issues like that. So if you work with positions and velocities, you do not actually know when you’re making an affect with the world.
We’re not the one ones; torque managed strolling’s what most likely all the most recent teams have performed. Boston Dynamics does that with Atlas. It is on the bleeding fringe of what the most effective teams on the planet have been demonstrating. So this is not the primary time it has been demonstrated, however doing it’s actually tough for each the software program and {hardware} facet. I feel what’s attention-grabbing for us right here is that there is only a few teams commercially which might be making an attempt to go after the business market which have arms, and which might be dynamically strolling by means of the world.
That is the primary large verify for us – to have the ability to technically present that we’re in a position to do it, and do it nicely. And the following large push for us is to combine all of the autonomous programs into the robotic, which we’re doing actively proper now, in order that the robotic can do finish to finish purposes and helpful work autonomously.
Determine
Alright, so I’ve bought some photographs right here of the robotic prototype. Are these arms near those which might be already doing dynamic gripping and manipulation?
Yep. These are our in-house designed arms, with silicone soft-grip fingertips. They’re the arms that we’ll use as we go right into a manufacturing surroundings too.
Okay. And what’s it in a position to take action far?
We have been in a position to do each single-handed and bimanual manipulation, grabbing objects with two arms and shifting them round. We have been in a position to do guide manipulation of packing containers and bins and different property that we see in warehouse and manufacturing environments. We have additionally performed single-handed grips of various client purposes, so like, baggage and chips and different kinds of issues. And we have performed these fairly efficiently in our lab at this level.
Proper. And that is by way of teleoperation, or have you ever bought some autonomous actions operating?
Each. Yeah, we have performed teleoperation work, largely from an AR coaching perspective, after which a lot of the work we have performed is with absolutely end-to-end programs that aren’t teleoperated.
Okay, so it is selecting issues up by itself, and shifting them round, and placing them down. And we’re speaking on the field scale right here, or the smaller, extra advanced merchandise stage?
We have performed some advanced gadgets and single-handed grabs, however we have performed a bunch of labor on with the ability to seize tote bins and different kinds of bins. So yeah, I might say bins, packing containers, carts, particular person client gadgets, we have been in a position to seize these efficiently and transfer them round.
Determine
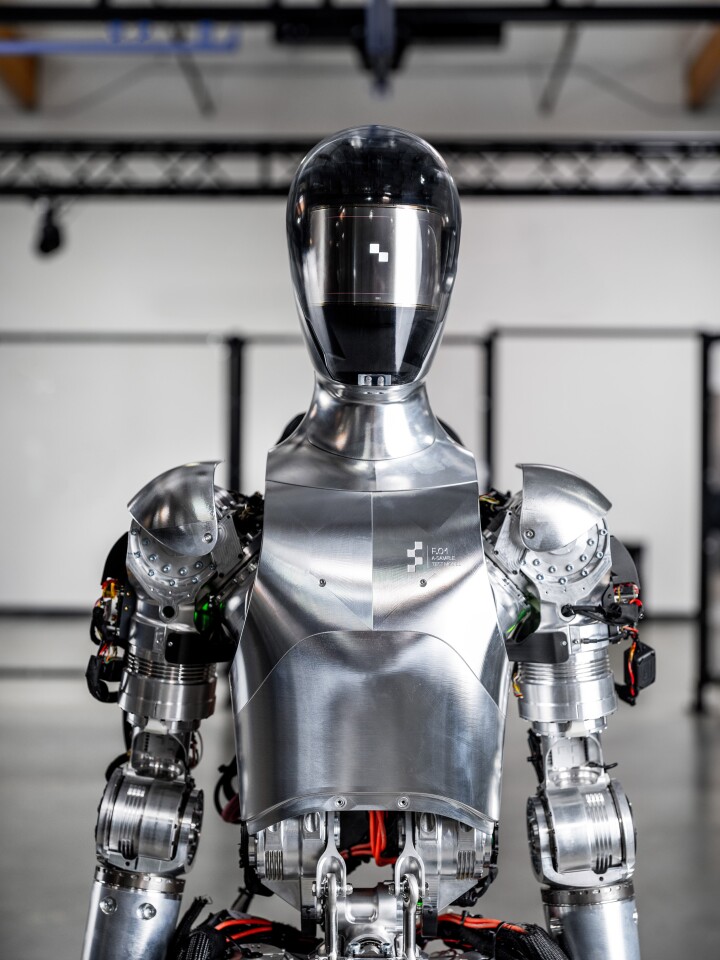
And the the facial display is built-in and up and operating?
Yeah, based mostly on what the robotic’s truly doing, we show a special kind of utility and design language on the display. So we have performed some early work on human-machine interplay, round how we will present the people on the planet what the robotic’s actively doing and what we’ll be doing subsequent. You need to know the robotic’s powered on, you wanna know, when it is actively in a process, what it plans to do after that process. We’re speaking intent by way of video and doubtlessly audio.
Proper, you might need it talking?
Yep. I would need to know what to do subsequent and may need instructions from you. You may need to ask it like, why are you doing this proper now? And you may want a response again.
Proper, so that you’re constructing that stuff in already?
We’re making an attempt to! We’re doing early stuff there.
So what are essentially the most highly effective joints, and what sort of torque are these motors placing out?
The knee and hip have over 200 Newton meters.
Okay. And aside from strolling, can it squat down at this level?
We’re not going to point out it but, however it might probably squat down, we have picked up bins and different issues now, and moved them round. We’ve an entire shakeout routine with a number of totally different actions, to check vary of movement. Reaching up excessive and down low…
Morning yoga!
Tesla’s doing yoga, so possibly we’ll be a yoga teacher.
Possibly the Pilates room is free! Very cool. So that is the quickest you are conscious that any firm has managed to get a get a robotic up and strolling by itself?
Yeah, I imply when you have a look at the time we spent in the direction of engineering this robotic, it has been like 12 months. I do not actually know anyone that is gotten right here higher or quicker. I do not actually know. I occur to assume it is most likely one of many quickest in historical past to do it.

Determine
Okay. So what are you guys hoping to display subsequent?
Subsequent is for us to have the ability to do end-to-end business purposes; actual work. And to have all our autonomy and AI programs operating on board. After which be capable to transfer the sorts of things round which might be central to what our prospects want. Constructing extra robots, and getting the autonomy working rather well.
Okay. And what number of robots have you ever bought absolutely assembled at this level?
We’ve 5 items of that model in our facility, however there are totally different maturity ranges. Some are simply the torso, some are absolutely constructed, some are strolling, some are near strolling, issues like that.
Gotcha. And have you ever began pushing them round with brooms but?
Yeah, we have performed some respectable quantity of push restoration testing… It all the time feels bizarre pushing the robotic, however yeah, we have performed a good quantity of that work.
We higher push them whereas we will, proper? They will be pushing us quickly sufficient.
Yeah, for certain!
Okay, so it is in a position to get better from a push whereas it is strolling?
We’ve not performed that precise factor, however you may push it when it is standing. The main focus actually hasn’t been making it sturdy to giant disturbances whereas strolling. It is largely been to get the locomotion management proper, then get this entire system doing end-to-end utility work, after which we’ll most likely spend extra time doing extra sturdy push restoration and different issues like that into early subsequent 12 months. We’ll get the end-to-end purposes operating, after which we’ll mature that, make it larger efficiency, make it quicker. After which extra sturdy, principally. We would like you to see the robotic doing actual work this 12 months, that is our objective.

Determine
Gotcha. Can it choose itself up from a fall at this stage?
We’ve designed it to try this, however we’ve not demonstrated that.
It sounds such as you’ve bought a lot of the main constructing blocks in place, to get these early “choose issues up and put them down” form of purposes occurring. Is it presently able to strolling whereas carrying a load?
Yeah, we have truly walked whereas carrying a load already.
Okay. So what are the important thing stuff you’ve nonetheless bought to knock over earlier than you may display that helpful work?
It is actually stitching every part collectively rather well and ensuring that notion programs can see the world, that we do not collide with the world, like, the knees do not hit when we will seize issues. Be certain the arms aren’t colliding with the objects on the planet. We’ve manipulation and notion insurance policies within the AI facet that we need to combine into system to do it absolutely finish to finish.
There’s a number of little issues to take a look at. We need to do higher movement planning, or doing different kinds of management work to make it much more sturdy so it might probably do issues again and again and get better from failures. So there’s an entire host of smaller issues that we’re all making an attempt to do nicely to sew collectively. We have demonstrated the primary fundamental finish to finish utility in our lab, and we simply have to make it much more sturdy.
What was that first utility?
It is a warehouse and manufacturing-related goal… Principally, shifting objects round our facility.
By way of SLAM and navigation, perceiving the world, the place’s that stuff at?
We’re localizing now in a map that we’re constructing in actual time. We’ve notion insurance policies which might be operating on actual time, together with occupancy and object detection. Constructing somewhat 3D simulation of the world, and labeling objects to know what they’re. That is what your Tesla does when it is driving down the street.
After which we’ve manipulation insurance policies for grabbing objects we’re going by means of, after which behaviors which might be form of serving to to sew that collectively. We’ve a giant board about methods to combine all these streams and make them work reliably on the robotic that we have developed within the final 12 months.

Determine
Proper. So it’s very camera-based is it? No time of flight form of stuff?
As of proper now, we’re utilizing seven RGB cameras. It is bought 360-degree imaginative and prescient, it might probably see behind it, to the edges, it might probably look down.
So when it comes to the strolling video, is that one-to-one velocity?
It is one to 1, yeah.
It strikes a bit!
It is superior, proper?
What kind of velocity is it at this level?
Possibly a meter a second, possibly rather less.
Appears to be like a bit faster than a number of the competitors.
Yep. Appears to be like fairly clean too. So yeah, it is fairly good, proper? It is most likely a few of the greatest strolling I’ve seen out of a few of the humanoids. Clearly Boston Dynamics has performed a fantastic job on the non-commercial analysis facet – like PETMAN, that is most likely the most effective humanoid strolling gait of all time.
That was the navy wanting factor, proper?
Yeah, somebody dressed him up in a gasoline masks.
He had some swagger, that man! Are your leg motors and whatnot enough to begin getting it operating sooner or later, leaping, that kind of stuff? I do know that is probably not in your wheelhouse.
We do not need to do this stuff. We do not need to bounce and do parkour and backflips and field jumps. Like, regular people do not do this. We simply need to do human work.
Because of Determine’s Brett Adcock and Lee Randaccio for his or her help with this story.
Supply: Determine
