
A lot of the world is roofed in oceans, that are sadly extremely polluted. One of many methods to fight the mounds of waste present in these very delicate ecosystems – particularly round coral reefs – is to make use of robots to grasp the cleanup. Nonetheless, current underwater robots are principally cumbersome with inflexible our bodies, unable to discover and pattern in advanced and unstructured environments, and are noisy on account of electrical motors or hydraulic pumps. For a extra appropriate design, scientists on the Max Planck Institute for Clever Techniques (MPI-IS) in Stuttgart regarded to nature for inspiration. They configured a jellyfish-inspired, versatile, energy-efficient and practically noise-free robotic the scale of a hand. Jellyfish-Bot is a collaboration between the Bodily Intelligence and Robotic Supplies departments at MPI-IS. “A Versatile Jellyfish-like Robotic Platform for Efficient Underwater Propulsion and Manipulation” was printed in Science Advances.
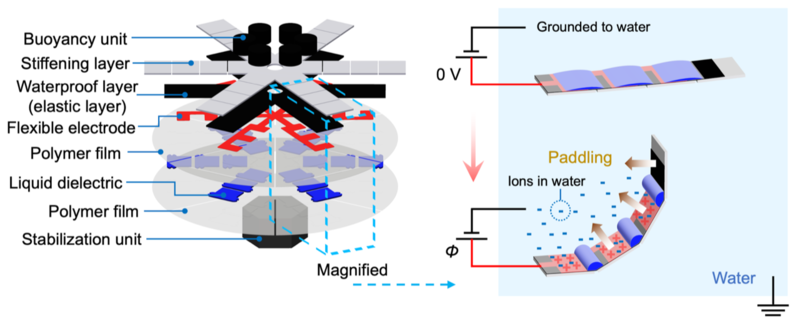
To construct the robotic, the group used electrohydraulic actuators via which electrical energy flows. The actuators function synthetic muscular tissues which energy the robotic. Surrounding these muscular tissues are air cushions in addition to gentle and inflexible elements which stabilize the robotic and make it waterproof. This manner, the excessive voltage working via the actuators can not contact the encircling water. An influence provide periodically supplies electrical energy via skinny wires, inflicting the muscular tissues to contract and develop. This enables the robotic to swim gracefully and to create swirls beneath its physique.
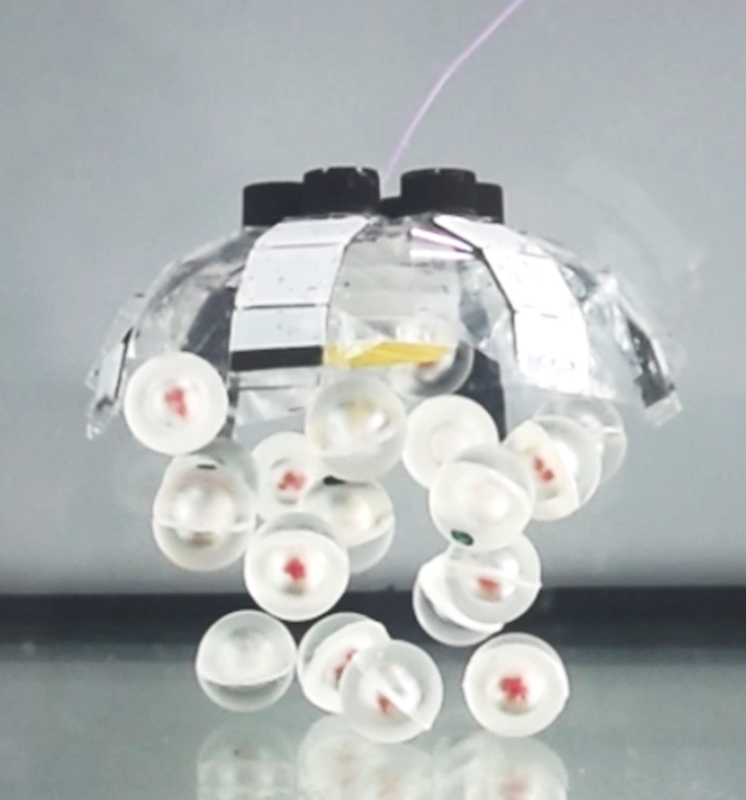
“When a jellyfish swims upwards, it could actually entice objects alongside its path because it creates currents round its physique. On this means, it could actually additionally acquire vitamins. Our robotic, too, circulates the water round it. This perform is beneficial in amassing objects akin to waste particles. It may well then transport the litter to the floor, the place it could actually later be recycled. Additionally it is capable of acquire fragile organic samples akin to fish eggs. In the meantime, there isn’t any adverse affect on the encircling surroundings. The interplay with aquatic species is mild and practically noise-free”, Tianlu Wang explains. He’s a postdoc within the Bodily Intelligence Division at MPI-IS and first writer of the publication.
His co-author Hyeong-Joon Joo from the Robotic Supplies Division continues: “70% of marine litter is estimated to sink to the seabed. Plastics make up greater than 60% of this litter, taking a whole lot of years to degrade. Subsequently, we noticed an pressing have to develop a robotic to govern objects akin to litter and transport it upwards. We hope that underwater robots might someday help in cleansing up our oceans.”
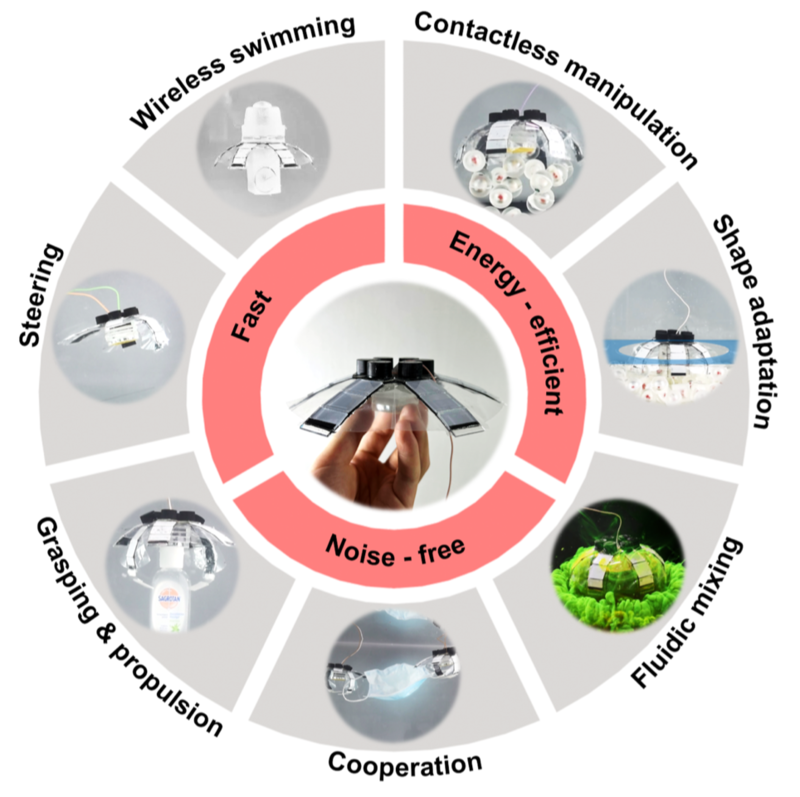
Jellyfish-Bots are able to shifting and trapping objects with out bodily contact, working both alone or with a number of together. Every robotic works quicker than different comparable innovations, reaching a pace of as much as 6.1 cm/s. Furthermore, Jellyfish-Bot solely requires a low enter energy of round 100 mW. And it’s protected for people and fish ought to the polymer materials insulating the robotic someday be torn aside. In the meantime, the noise from the robotic can’t be distinguished from background ranges. On this means Jellyfish-Bot interacts gently with its surroundings with out disturbing it – very like its pure counterpart.
The robotic consists of a number of layers: some stiffen the robotic, others serve to maintain it afloat or insulate it. An additional polymer layer features as a floating pores and skin. Electrically powered synthetic muscular tissues often known as HASELs are embedded into the center of the totally different layers. HASELs are liquid dielectric-filled plastic pouches which can be partially lined by electrodes. Making use of a excessive voltage throughout an electrode expenses it positively, whereas surrounding water is charged negatively. This generates a drive between positively-charged electrode and negatively-charged water that pushes the oil contained in the pouches forwards and backwards, inflicting the pouches to contract and loosen up – resembling an actual muscle. HASELs can maintain the excessive electrical stresses generated by the charged electrodes and are protected in opposition to water by an insulating layer. That is necessary, as HASEL muscular tissues had been by no means earlier than used to construct an underwater robotic.
Step one was to develop Jellyfish-Bot with one electrode with six fingers or arms. Within the second step, the group divided the one electrode into separated teams to independently actuate them.
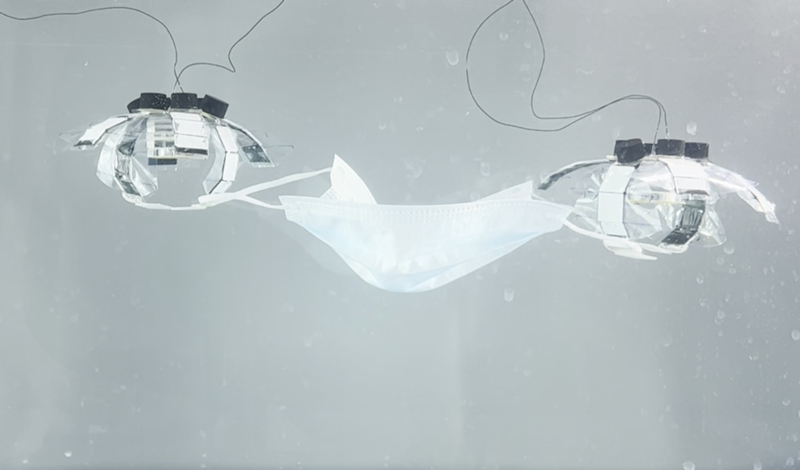
“We achieved greedy objects by making 4 of the arms perform as a propeller, and the opposite two as a gripper. Or we actuated solely a subset of the arms, in an effort to steer the robotic in numerous instructions. We additionally regarded into how we are able to function a collective of a number of robots. As an illustration, we took two robots and allow them to decide up a masks, which may be very troublesome for a single robotic alone. Two robots may also cooperate in carrying heavy masses. Nonetheless, at this level, our Jellyfish-Bot wants a wire. It is a downside if we actually wish to use it someday within the ocean”, Hyeong-Joon Joo says.
Maybe wires powering robots will quickly be a factor of the previous. “We intention to develop wi-fi robots. Fortunately, we’ve achieved step one in direction of this aim. We’ve integrated all of the practical modules just like the battery and wi-fi communication components in order to allow future wi-fi manipulation”, Tianlu Wang continues. The group connected a buoyancy unit on the prime of the robotic and a battery and microcontroller to the underside. They then took their invention for a swim within the pond of the Max Planck Stuttgart campus, and will efficiently steer it alongside. To this point, nevertheless, they might not direct the wi-fi robotic to vary course and swim the opposite means.
Figuring out the group, it received’t take lengthy to realize this aim.
PAPER – A flexible jellyfish-like robotic platform for efficient underwater propulsion and manipulation. Wang, T., Joo, H. J., Track, S., Hu, W., Keplinger, C., and Sitti, M. Science Advances, 9(15), 2023, eadg0292.
tags: bio-inspired

Max Planck Institute for Clever Techniques
‘s aim is to analyze and perceive the organizing ideas of clever methods and the underlying perception-action-learning loop.
