
Routing in Google Maps stays one in all our most useful and regularly used options. Figuring out the most effective route from A to B requires making advanced trade-offs between elements together with the estimated time of arrival (ETA), tolls, directness, floor circumstances (e.g., paved, unpaved roads), and consumer preferences, which range throughout transportation mode and native geography. Usually, essentially the most pure visibility we’ve got into vacationers’ preferences is by analyzing real-world journey patterns.
Studying preferences from noticed sequential choice making conduct is a traditional software of inverse reinforcement studying (IRL). Given a Markov choice course of (MDP) — a formalization of the street community — and a set of demonstration trajectories (the traveled routes), the aim of IRL is to recuperate the customers’ latent reward operate. Though previous analysis has created more and more normal IRL options, these haven’t been efficiently scaled to world-sized MDPs. Scaling IRL algorithms is difficult as a result of they usually require fixing an RL subroutine at each replace step. At first look, even making an attempt to suit a world-scale MDP into reminiscence to compute a single gradient step seems infeasible because of the giant variety of street segments and restricted excessive bandwidth reminiscence. When making use of IRL to routing, one wants to think about all affordable routes between every demonstration’s origin and vacation spot. This means that any try to interrupt the world-scale MDP into smaller parts can’t take into account parts smaller than a metropolitan space.
To this finish, in “Massively Scalable Inverse Reinforcement Studying in Google Maps”, we share the results of a multi-year collaboration amongst Google Analysis, Maps, and Google DeepMind to surpass this IRL scalability limitation. We revisit traditional algorithms on this house, and introduce advances in graph compression and parallelization, together with a brand new IRL algorithm referred to as Receding Horizon Inverse Planning (RHIP) that gives fine-grained management over efficiency trade-offs. The ultimate RHIP coverage achieves a 16–24% relative enchancment in world route match price, i.e., the proportion of de-identified traveled routes that precisely match the recommended route in Google Maps. To the most effective of our information, this represents the most important occasion of IRL in an actual world setting to this point.
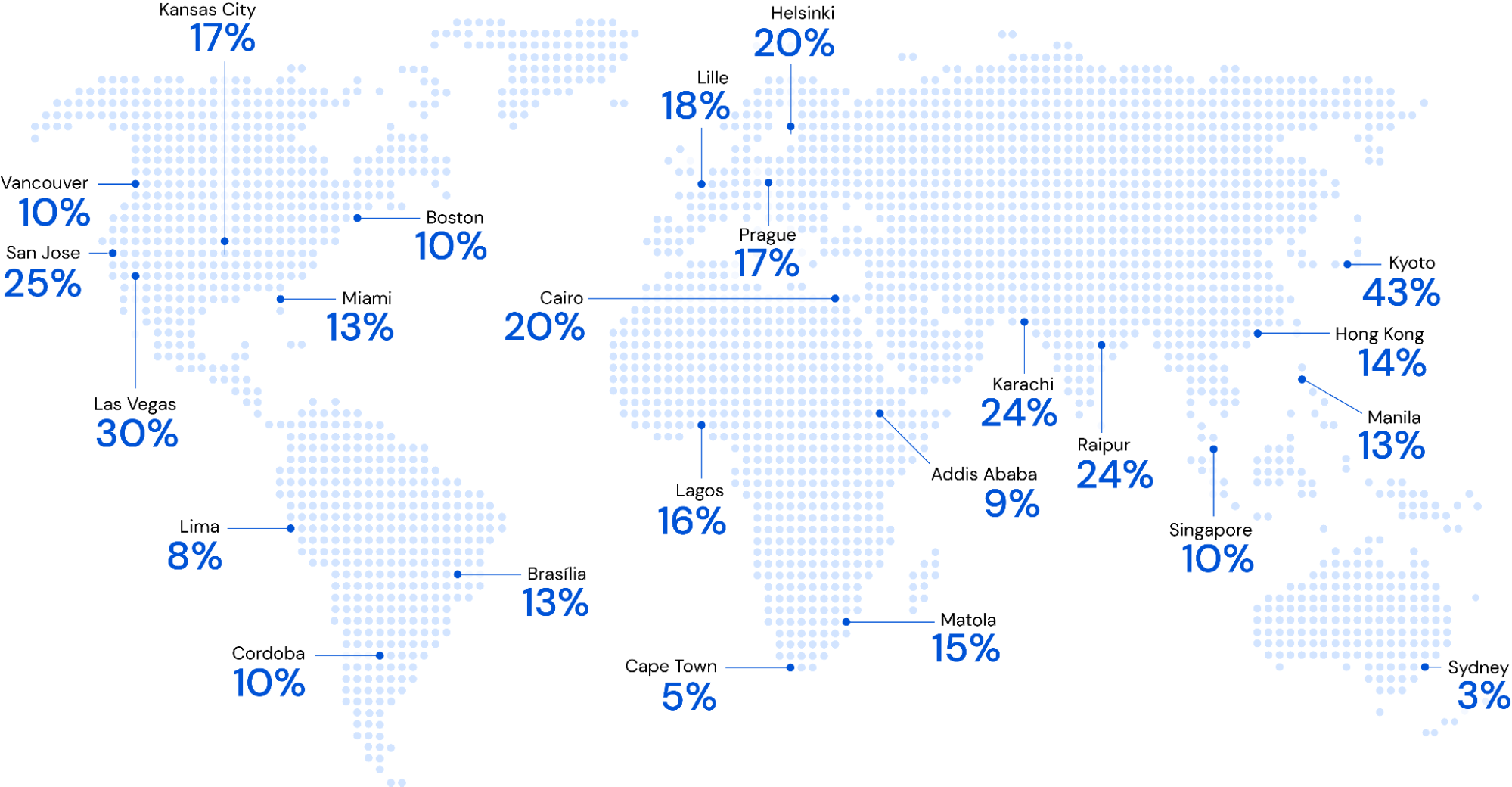 Google Maps enhancements in route match price relative to the prevailing baseline, when utilizing the RHIP inverse reinforcement studying coverage.
Google Maps enhancements in route match price relative to the prevailing baseline, when utilizing the RHIP inverse reinforcement studying coverage.
The advantages of IRL
A delicate however essential element in regards to the routing downside is that it’s aim conditioned, that means that each vacation spot state induces a barely completely different MDP (particularly, the vacation spot is a terminal, zero-reward state). IRL approaches are properly fitted to some of these issues as a result of the discovered reward operate transfers throughout MDPs, and solely the vacation spot state is modified. That is in distinction to approaches that instantly study a coverage, which generally require an additional issue of S parameters, the place S is the variety of MDP states.
As soon as the reward operate is discovered by way of IRL, we benefit from a strong inference-time trick. First, we consider the complete graph’s rewards as soon as in an offline batch setting. This computation is carried out solely on servers with out entry to particular person journeys, and operates solely over batches of street segments within the graph. Then, we save the outcomes to an in-memory database and use a quick on-line graph search algorithm to seek out the best reward path for routing requests between any origin and vacation spot. This circumvents the necessity to carry out on-line inference of a deeply parameterized mannequin or coverage, and vastly improves serving prices and latency.
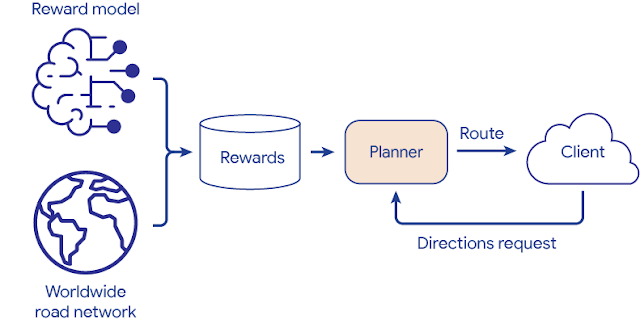 Reward mannequin deployment utilizing batch inference and quick on-line planners.
Reward mannequin deployment utilizing batch inference and quick on-line planners.
Receding Horizon Inverse Planning
To scale IRL to the world MDP, we compress the graph and shard the worldwide MDP utilizing a sparse Combination of Specialists (MoE) based mostly on geographic areas. We then apply traditional IRL algorithms to unravel the native MDPs, estimate the loss, and ship gradients again to the MoE. The worldwide reward graph is computed by decompressing the ultimate MoE reward mannequin. To supply extra management over efficiency traits, we introduce a brand new generalized IRL algorithm referred to as Receding Horizon Inverse Planning (RHIP).
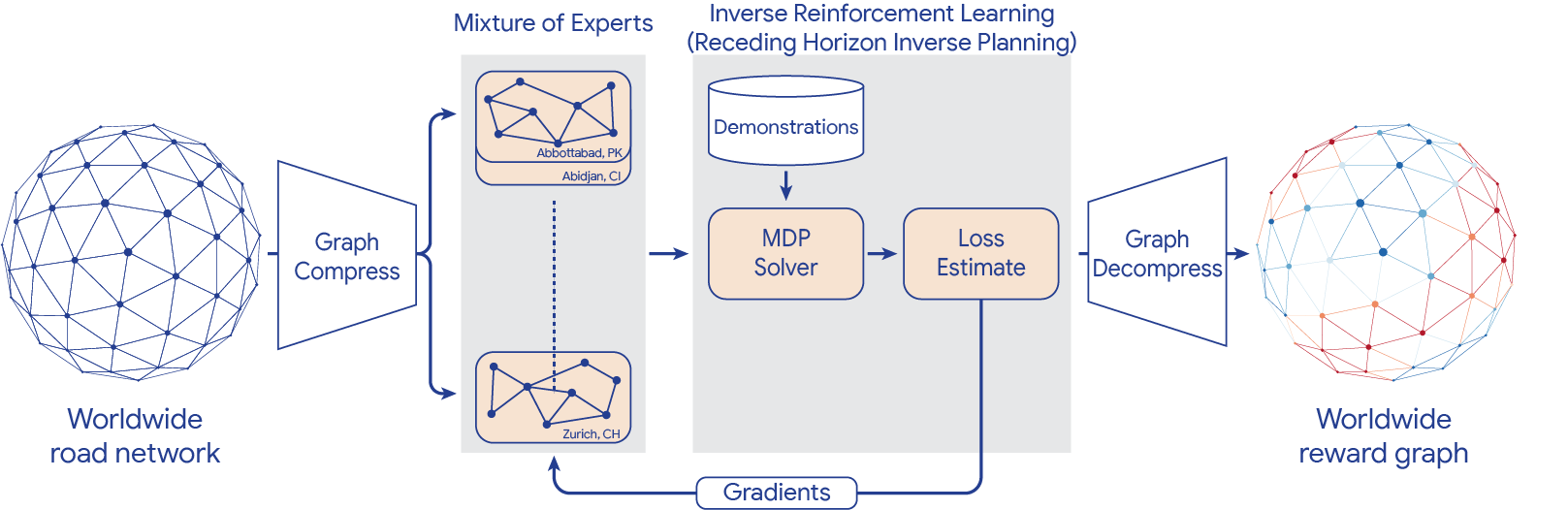 IRL reward mannequin coaching utilizing MoE parallelization, graph compression, and RHIP.
IRL reward mannequin coaching utilizing MoE parallelization, graph compression, and RHIP.
RHIP is impressed by folks’s tendency to carry out intensive native planning (“What am I doing for the following hour?”) and approximate long-term planning (“What’s going to my life seem like in 5 years?”). To benefit from this perception, RHIP makes use of sturdy but costly stochastic insurance policies within the native area surrounding the demonstration path, and switches to cheaper deterministic planners past some horizon. Adjusting the horizon H permits controlling computational prices, and sometimes permits the invention of the efficiency candy spot. Curiously, RHIP generalizes many traditional IRL algorithms and supplies the novel perception that they are often seen alongside a stochastic vs. deterministic spectrum (particularly, for H=∞ it reduces to MaxEnt, for H=1 it reduces to BIRL, and for H=0 it reduces to MMP).
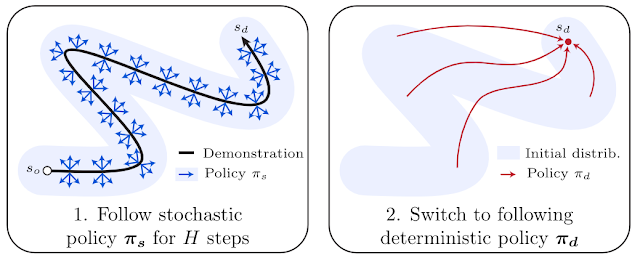 Given an illustration from so to sd, (1) RHIP follows a sturdy but costly stochastic coverage within the native area surrounding the demonstration (blue area). (2) Past some horizon H, RHIP switches to following a less expensive deterministic planner (purple strains). Adjusting the horizon permits fine-grained management over efficiency and computational prices.
Given an illustration from so to sd, (1) RHIP follows a sturdy but costly stochastic coverage within the native area surrounding the demonstration (blue area). (2) Past some horizon H, RHIP switches to following a less expensive deterministic planner (purple strains). Adjusting the horizon permits fine-grained management over efficiency and computational prices.
Routing wins
The RHIP coverage supplies a 15.9% and 24.1% elevate in world route match price for driving and two-wheelers (e.g., scooters, bikes, mopeds) relative to the well-tuned Maps baseline, respectively. We’re particularly enthusiastic about the advantages to extra sustainable transportation modes, the place elements past journey time play a considerable position. By tuning RHIP’s horizon H, we’re capable of obtain a coverage that’s each extra correct than all different IRL insurance policies and 70% sooner than MaxEnt.
Our 360M parameter reward mannequin supplies intuitive wins for Google Maps customers in stay A/B experiments. Inspecting street segments with a big absolute distinction between the discovered rewards and the baseline rewards will help enhance sure Google Maps routes. For instance:
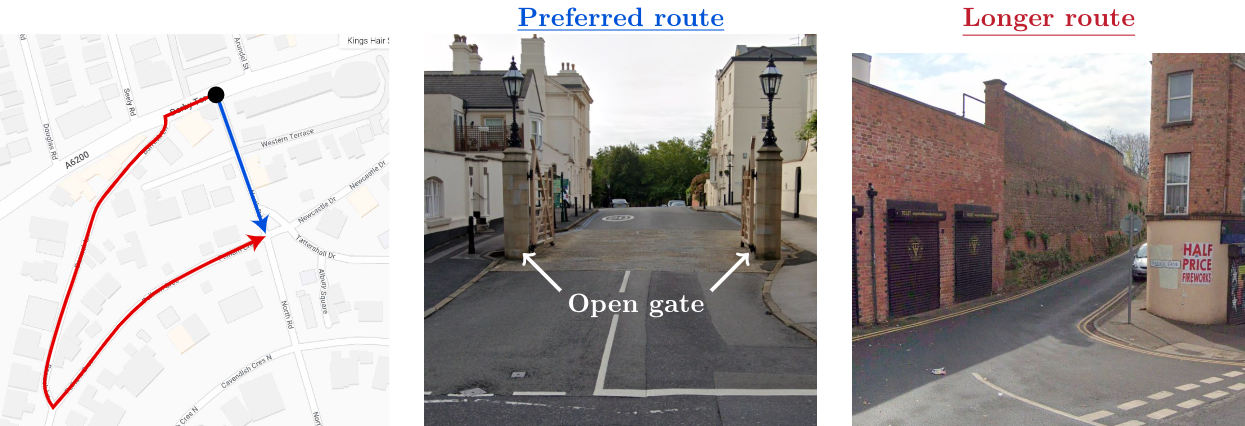 Nottingham, UK. The popular route (blue) was beforehand marked as non-public property because of the presence of a big gate, which indicated to our programs that the street could also be closed at occasions and wouldn’t be preferrred for drivers. In consequence, Google Maps routed drivers via an extended, alternate detour as an alternative (purple). Nevertheless, as a result of real-world driving patterns confirmed that customers often take the popular route with out a difficulty (because the gate is sort of by no means closed), IRL now learns to route drivers alongside the popular route by inserting a big optimistic reward on this street section.
Nottingham, UK. The popular route (blue) was beforehand marked as non-public property because of the presence of a big gate, which indicated to our programs that the street could also be closed at occasions and wouldn’t be preferrred for drivers. In consequence, Google Maps routed drivers via an extended, alternate detour as an alternative (purple). Nevertheless, as a result of real-world driving patterns confirmed that customers often take the popular route with out a difficulty (because the gate is sort of by no means closed), IRL now learns to route drivers alongside the popular route by inserting a big optimistic reward on this street section.
Conclusion
Growing efficiency by way of elevated scale – each when it comes to dataset dimension and mannequin complexity – has confirmed to be a persistent pattern in machine studying. Related features for inverse reinforcement studying issues have traditionally remained elusive, largely because of the challenges with dealing with virtually sized MDPs. By introducing scalability developments to traditional IRL algorithms, we’re now capable of prepare reward fashions on issues with lots of of tens of millions of states, demonstration trajectories, and mannequin parameters, respectively. To the most effective of our information, that is the most important occasion of IRL in a real-world setting to this point. See the paper to study extra about this work.
Acknowledgements
This work is a collaboration throughout a number of groups at Google. Contributors to the mission embrace Matthew Abueg, Oliver Lange, Matt Deeds, Jason Dealer, Denali Molitor, Markus Wulfmeier, Shawn O’Banion, Ryan Epp, Renaud Hartert, Rui Tune, Thomas Sharp, Rémi Robert, Zoltan Szego, Beth Luan, Brit Larabee and Agnieszka Madurska.
We’d additionally like to increase our due to Arno Eigenwillig, Jacob Moorman, Jonathan Spencer, Remi Munos, Michael Bloesch and Arun Ahuja for precious discussions and strategies.
